4 Metodología
En la sección se explicará los pasos que se realizaron para detectar cambios o no cambios en diversas turberas en la provincia de Chiloé. Primeramente se realizaron varios pasos para el procesamiento de las imágenes radar antes y después para las turberas previamente definidas como “cambio” y como también se realizó en dos períodos las Turberas denominadas como “estables”. Primero, se aplicaron técnicas de pre procesamiento a las imágenes para mejorar su calidad y normalización. Luego, se sometieron a diversos métodos convencionales de detección de cambios, los cuales permitieron identificar las áreas donde se produjeron cambios. Estos resultados fueron luego pasados por la etapa de discretización de cambios, utilizando un enfoque tradicional y otro basado en segmentación de Deep Learning. Finalmente, se evaluaron los resultados utilizando métricas de intersección para validar la efectividad del procedimiento propuesto.
4.1 Pre Procesamientos
4.2 Métodos Convencionales
El texto de esta subsección no tiene estructura y corresponde bloques de información sin orden todavía
4.2.1 Diferencia Directa (DD)
El cálculo de la diferencia directa corresponde a la resta de ambas imágenes retornando sus valores absolutos de diferencia.
DD(i,j)=I_1(i, j)-I_2(i, j) Los elementos I_1 y I_2 corrponde a las imágenes.
4.2.2 Relación logarítmica (LR) (Dekker, 1998)
Refleja la diferencia entre los píxeles individuales. Esto se calcula utilizando la siguiente formula:
D_{LR} (i, j) = log_{10}\frac{I_2(i, j)}{I_1(i, j)}
4.2.3 Relación de verosimilitud logarítmica (LLR) (Cui et al., 2019)
Refleja la diferencia entre los vecindarios. Se calcula utilizando las características estadísticas del vecindario del píxel para construir la relación de verosimilitud y se expresa con la siguiente ecuación:
D_{LLR}(i, j)= log_{10}\left(\frac{(\sum_{(m,n)\in\Omega{i,j}}I_1(m,n)+\sum_{(m,n)\in\Omega{i,j}}I_2(m,n))^2}{4\times \sum_{(m,n)\in\Omega{i,j}}I_1(m,n)\times\sum_{(m,n)\in\Omega{i,j}}I_2(m,n)}\right) Donde:
\Omega_{i, j} es el vecindario de (i, j),
I{i,j(m,n)} es laintensidad de pixeles en \Omega_{i, j}.
I_{(m,n)} es el valor de píxel de la imagen original en la posición (m,n).
Se calcula utilizando las características estadísticas del vecindario del píxel para construir la relación de verosimilitud
4.2.4 Enhanced difference image (EDI)
El método propuesto para crear la imagen de diferencia mejorada combina la consistencia de la diferencia entre los píxeles individuales y sus vecindarios. Esto se logra mediante el uso de la relación logarítmica (LR) y la relación de verosimilitud logarítmica (LLR). La LR refleja la diferencia entre los píxeles individuales, mientras que la LLR refleja la diferencia entre los vecindarios.
D(i, j) = D{LR} (i, j) \times D_{LLR} (i, j)
4.2.5 Log Mean Ratio (LMR)
El operador LMR se define como la relación entre la media logarítmica de dos imágenes, I_1 y I_2. Esta relación se calcula para cada píxel (i,j) en el vecindario \Omega.
D_{LMR}(i, j)= log(max(\frac{\mu(\Omega_{I_1})}{\mu(\Omega_{I_2})}, \frac{\mu(\Omega_{I_2})}{\mu(\Omega_{I_1})}))
Donde \mu(\Omega_{I_1}) y \mu(\Omega_{I_2}) presenta el promedio del vecindario en I_1 y I_2, respectivamente.
4.3 Discretización
El texto de esta subsección no tiene estructura y corresponde bloques de información sin orden todavía
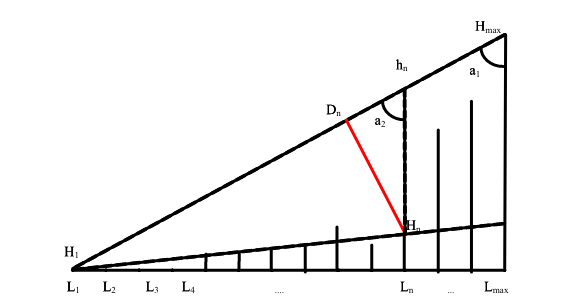
4.3.1 Triangular Threshold Segmentation
El método de segmentación de umbral triangular se basa en la forma única del histograma DI y utiliza un método de Douglas-Peucker (Douglas y Peucker, 1973) para segmentar los datos en diferentes clases. Esto se logra mediante el uso de los diferentes niveles de gris y sus frecuencias correspondientes.
P_1
Este método consiste en:
- Calcular el histograma de la imagen DI.
- Calcular el valor umbral inicial (T) como el punto medio entre el valor mínimo y máximo de la imagen DI.
- Inicializar una lista vacía para almacenar las clases resultantes.
- Repetir los pasos 5-7 hasta que el valor umbral no cambie significativamente.
- Calcular las medias de las clases formadas por los píxeles con valores por encima y por debajo del umbral actual.
- Calcular el nuevo valor umbral como el promedio entre las medias de las clases.
- Actualizar las clases resultantes dividiendo los píxeles en dos grupos: aquellos con valores por encima del umbral y aquellos con valores por debajo del umbral.
- Devolver las clases resultantes.